Loading...
Searching...
No Matches
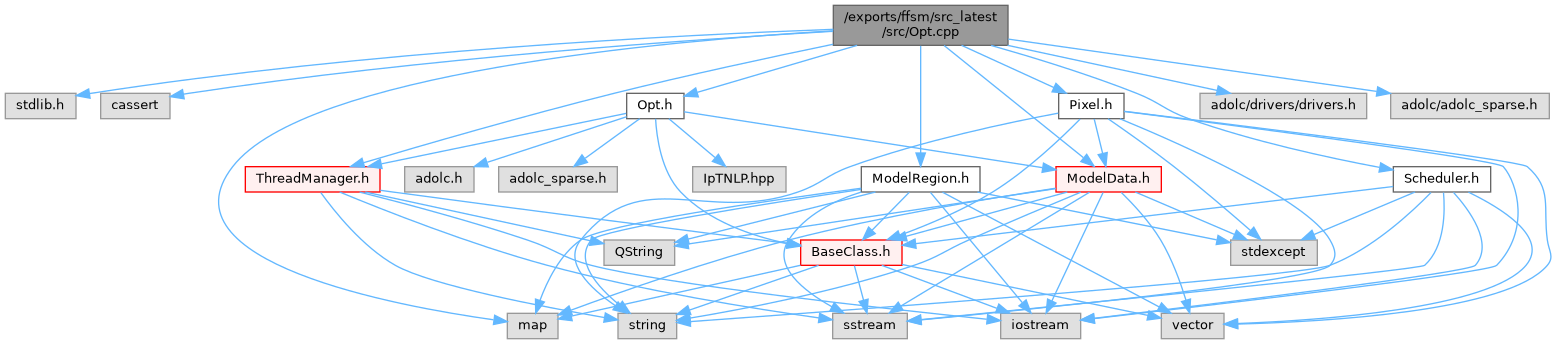
#include <stdlib.h>#include <cassert>#include <map>#include <adolc/drivers/drivers.h>#include <adolc/adolc_sparse.h>#include "Opt.h"#include "ModelData.h"#include "Pixel.h"#include "ThreadManager.h"#include "Scheduler.h"#include "ModelRegion.h"
Include dependency graph for Opt.cpp:
Go to the source code of this file.
Macros | |
| #define | CONSTRAIN_START_LOOP(pVector, cn) |
| #define | CONSTRAIN_END_LOOP }}} |
Typedefs | |
| typedef std::map< string, endvar > | VarMap |
| typedef std::pair< std::string, endvar > | VarPair |
Macro Definition Documentation
◆ CONSTRAIN_END_LOOP
| #define CONSTRAIN_END_LOOP }}} |
Definition at line 46 of file Opt.cpp.
58 {
59 // filling the list of variables and their domain and optionally their bonds
60 // if you add variables in the model that enter optimisation you'll have to add them here
61 // the underlying map goes automatically in alphabetical order
62 // original order: pc,pl,dc,dl,da,sc,sl,sa,exp
63 // 20140328: if these vars have a lower bound > 0 the model doesn't solve when volumes in a region go to zero !!!
64
65 // syntax: declareVariable("name", domainType, lbound[default=0], ubound[default= +inf], variable defining lower bounds[default=""], variable defining upper bound[default=""])
66
67 // all variables have upper or equal than zero bound:
77 //declareVariable("st", DOM_PRI_PR, "Supply, total", 0.0,UBOUND_MAX,"","in");
78}
79/**
80Declare the constrains and their properties. For the domain type @see BaseClass
81*/
82void
83Opt::declareConstrains (){
84 // domain of constrains variables
85 // for domain
86 constrain mkeq2;
91 //mkeq2.evaluate = Opt::mkteq2f;
92
93 constrain mkeq3;
98 //mkeq3.evaluate = Opt::mkteq3f;
99
100 constrain mkeq4;
105
106 constrain mkeq5;
111
112 constrain mkeq6;
117
118 constrain mkeq7;
123
124 constrain mkeq8;
129
130 constrain mkeq13;
135
136 constrain mkeq14;
141
142 constrain mkeq17;
144 mkeq17.comment="[h16] Constrain of the transformaton supply (lower than the regional maximal production capacity)";
147
148
149 constrain mkeq23;
154
155 constrain mkeq24;
160
161 constrain mkeq26;
166
167 constrain mkeq25;
169 mkeq25.comment="Verification of the null trasformers supply (price of raw product + trasf product > trasf product)";
172
173 constrain mkeq18;
178
179 constrain resbounds;
181 resbounds.comment="Constrain on raw material supply (lower than inventory, for each possible combination of primary products)";
184
185
186
187 //constrain steq;
188 //steq.name="steq";
189 //steq.comment="computation of total supply";
190 //steq.domain=DOM_PRI_PR;
191 //steq.direction = CONSTR_EQ;
192
193 cons.push_back(mkeq2);
194 cons.push_back(mkeq6);
195 cons.push_back(mkeq7);
196 cons.push_back(mkeq13);
197 cons.push_back(mkeq23);
198 cons.push_back(mkeq3);
199 cons.push_back(mkeq4);
200 cons.push_back(mkeq5);
201 cons.push_back(mkeq8);
202 cons.push_back(mkeq14);
203 cons.push_back(mkeq24);
204 cons.push_back(mkeq17);
205 cons.push_back(mkeq26);
206 cons.push_back(mkeq25);
207 //cons.push_back(mkeq18);
208 cons.push_back(resbounds);
209 //cons.push_back(steq);
210;
211
212
213
214}
215/**
216Define the objective function
217*/
218template<class T> bool
220
221 double aa, bb, dc0, sigma, a_pr, ct, m, zeromax,supCorr2;
222 obj_value = 0.;
223 zeromax = 0.;
224
227 // // consumer's surplus..
228 // sum ((i,p_tr),
229 // AA(i,p_tr)*(RVAR('dc',i,p_tr)**((sigma(p_tr)+1)/sigma(p_tr)))
230 // - AA(i,p_tr)*((0.5*dc0(i,p_tr))**((sigma(p_tr)+1)/sigma(p_tr)))
231 // - RVAR('pc',i,p_tr)*RVAR('dc',i,p_tr)
232 // )
233 // 20161003: TODO: check if subsidies should enter also the obj function other than the bounds equations. For the moment, as agreed with Sylvain, they are left outside the obj function, but I am not sure of it.
234 // 20170306: Subsides (but not substitute products) added to the aa and bb parameters. They do not change anything.
235 // 20170307: obj_value does not account for the minus 0-5dc0 part anymore. It doesn't chang anything if not that the "reported" surplus is negative.
236 // The integral of a power function p=q^a with a < -1 (derived from an q=p^b function with b between 0 and -1) is negative ranging from -inf at q=0
237 // to 0- with q = +inf
242 //obj_value += aa*pow(mymax(zeromax,x[gix("dc",r1,r2,p)]),(sigma+1)/sigma)-aa*pow(mymax(zeromax,0.5*dc0),(sigma+1)/sigma)-x[gix("pc",r1,r2,p+nPriPr)]*x[gix("dc",r1,r2,p)];
243 obj_value += aa*pow(mymax(zeromax,x[gix("dc",r1,r2,p)]),(sigma+1)/sigma)-x[gix("pc",r1,r2,p+nPriPr)]*x[gix("dc",r1,r2,p)];
244
245 }
246 // // producers surplus..
247 // + sum((i,p_pr),
248 // RVAR('pc',i,p_pr)*RVAR('sc',i,p_pr)
249 // - BB(i,p_pr)*(RVAR('sc',i,p_pr)**((sigma(p_pr)+1)/sigma(p_pr)))
250 // )
254 //supCorr2 = gpd("supCorr2",l2r[r1][r2],priPr[p]);
255 obj_value += x[gix("pc",r1,r2,p)]*x[gix("sc",r1,r2,p)] - bb*pow(mymax(zeromax,x[gix("sc",r1,r2,p)]),((sigma+1)/sigma));
256 }
257 // // trasformations between primary products
258 // + sum ((i,p_pr,p_pr2),
259 // +RVAR('pc',i,p_pr2)*pres(p_pr,p_pr2)*RVAR('sc',i,p_pr)
260 // -BB(i,p_pr2)*(pres(p_pr,p_pr2)*RVAR('sc',i,p_pr))**((sigma(p_pr2)+1)/sigma(p_pr2))
261 // )
262
268 obj_value += x[gix("pc",r1,r2,p2)]*a_pr*x[gix("sc",r1,r2,p1)]-bb*pow(mymax(zeromax,a_pr*x[gix("sc",r1,r2,p1)]),(sigma+1)/sigma);
269 }
270 }
271 // // surplus of transport agents..
272 // + sum((i,j,prd), (RVAR('pl',j,prd)-RVAR('pl',i,prd)-CT(i,j,prd))*EXP(i,j,prd))
275 ct = (gpd("ct",l2r[r1][r2],allPr[p],DATA_NOW,i2s(l2r[r1][r2To])) * gpd("pol_tcSub",l2r[r1][r2],allPr[p]));
277 }
278 }
279
280 // // transformers surplus..
281 // + sum((i,p_tr), (RVAR('pl',i,p_tr)-m(i,p_tr))*(RVAR('sl',i,p_tr))) // attenction it's local. if we include w imports or p expports this have to change
285 }
286 // - sum((i,p_pr), RVAR('pl',i,p_pr)*RVAR('dl',i,p_pr)) // to total and an other equation total=local+abroad should be added
289 }
290 } // end of each lev2 regions
291
292 } //end of each r1 regions
293
294 //obj_value = -obj_value; // we want maximisation, ipopt minimize! (donei n the options - scaling obj function)
295
296 //exit(0);
297 return true;
298 // checked 20120802 this function is ok with gams, both in input and in output of the preoptimisation stage
299
300}
301
302
303
304/** Template function to implement (define) the previously declared constains.
305To the initial macro loop it must be passed the product vector over where to loop (priPr, secPr or allPr) and the order of the constrain has it has been added to the const vector.
306It could be possible to change this in a map and uses name, but then we would loose control on the constrains order, and we saw that it matters for finding the equilibrium.
307
308*/
309template<class T> bool
311
312 double a_pr, a, sigma, ff, pol_mktDirInt_s, pol_mktDirInt_d, pol_mktDirInt_d_pSubstituted, pol_mktDirInt_d_1, pol_mktDirInt_d_1_pSubstituted, gg, q1, p1v, t1, r1v, psi, eta, pworld, ct, k, dispor, mv, in, in_1, supCorr, es_d, pc_1, pc_pSubstituted, pc_1_pSubstituted, additionalDemand;
313 Index cix = 0;
314 Index debug = 0;
315
316 // mkteq2(i,p_tr).. RVAR('dl',i,p_tr)+sum(j,EXP(i,j,p_tr)) =e= RVAR('sl',i,p_tr)+ sum(b,EXP(b,i,p_tr)); // h1
317 CONSTRAIN_START_LOOP(secPr, 0) // attenction! you have to give the same order number as you inserted in the cons vector
318 //g[cix] = x[gix("dl",r1,r2,psec)]-x[gix("sl",r1,r2,psec)]+x[gix("da",r1,r2,p)];
320 for (uint r2To=0;r2To<l2r[r1].size();r2To++){
322 }
324
325
326 // mkteq6(i,p_tr).. RVAR('dc',i,p_tr) =e= GG(i,p_tr)*(RVAR('pc',i,p_tr)**sigma(p_tr)); // eq. 20 20160216: added sustitution elasticity in the demand
327 // DEMAND EQUATION of transformed products
332 pol_mktDirInt_d = gpd("pol_mktDirInt_d",l2r[r1][r2],secPr[p]); // market policies (subs or taxes) this year
333 pol_mktDirInt_d_1 = gpd("pol_mktDirInt_d",l2r[r1][r2],secPr[p],previousYear); // market policies previous year
335 g[cix] = - gg*pow(x[gix("pc",r1,r2,psec)]*pol_mktDirInt_d,sigma); // note that putting 0.0 and 0.000 IS NOT the same thing. With 0.000 I have a seg fault in ADOL-C !!
337 // Substitution part within forest producs (whose price is endogenous to the model)..
338 for (uint p2=0;p2<secPr.size();p2++){
340 if(es_d){
342 pol_mktDirInt_d_pSubstituted = gpd("pol_mktDirInt_d",l2r[r1][r2],secPr[p2]); // market policies this year for the substitute product
343 pol_mktDirInt_d_1_pSubstituted = gpd("pol_mktDirInt_d",l2r[r1][r2],secPr[p2],previousYear); // market policies last year for the substitute product
344
345 g[cix] *= pow(
346 (
347 ((x[gix("pc",r1,r2,psec)]*pol_mktDirInt_d) / (x[gix("pc",r1,r2,priPr.size()+p2)]*pol_mktDirInt_d_pSubstituted))
348 /
349 ((pc_1*pol_mktDirInt_d_1) / (pc_1_pSubstituted*pol_mktDirInt_d_1_pSubstituted))
350 ), es_d
351 );
352 }
353 }
354 // Substitution part with other products with exogenous prices (e.g. fossilFuels)..
357 if(es_d){
360
361 g[cix] *= pow(
362 (
364 /
365 (pc_1*pol_mktDirInt_d_1 / pc_1_pSubstituted)
366 ), es_d
367 );
368 }
369 }
370 //g[cix] = x[gix("dc",r1,r2,p)]-gg*pow(x[gix("pc",r1,r2,psec)],sigma); // original without substitution elasticity
373
374
375 // mkteq7(i,p_tr).. RVAR('da',i,p_tr)/RVAR('dl',i,p_tr) =e= ((q1(i,p_tr)*RVAR('pl',i,p_tr))/(p1(i,p_tr)*PT_t(p_tr)))**psi(i,p_tr); // h7 and h3 ?
378 p1v = 1-q1;
381 g[cix] = x[gix("da",r1,r2,p)]/x[gix("dl",r1,r2,psec)] - pow((q1*x[gix("pl",r1,r2,psec)])/(p1v*pworld),psi);
383
384 // mkteq13(i,p_tr).. RVAR('pc',i,p_tr)*RVAR('dc',i,p_tr) =e= RVAR('dl',i,p_tr)*RVAR('pl',i,p_tr)+RVAR('da',i,p_tr)*PT_t(p_tr); // h9
387 g[cix] = x[gix("pc",r1,r2,psec)]*x[gix("dc",r1,r2,p)]-x[gix("dl",r1,r2,psec)]*x[gix("pl",r1,r2,psec)]-x[gix("da",r1,r2,p)]*pworld;
389
390 // mkteq23(i,p_tr).. RVAR('dc',i,p_tr) =e= (q1(i,p_tr)*(RVAR('da',i,p_tr)**((psi(i,p_tr)-1)/psi(i,p_tr)))+ p1(i,p_tr)*(RVAR('dl',i,p_tr)**((psi(i,p_tr)-1)/psi(i,p_tr))))**(psi(i,p_tr)/(psi(i,p_tr)-1)); // h3
394 p1v = 1-q1;
395 g[cix] = x[gix("dc",r1,r2,p)] -
396 pow(
397 q1 * pow(x[gix("da",r1,r2,p)],(psi-1)/psi)
398 + p1v * pow(x[gix("dl",r1,r2,psec)],(psi-1)/psi),
399 psi/(psi-1)
400 );
402
403 // mkteq3(i,p_pr).. RVAR('dl',i,p_pr)+sum(j,EXP(i,j,p_pr)) =e= RVAR('sl',i,p_pr)+ sum(b,EXP(b,i,p_pr))+sum(p_pr2, pres(p_pr2,p_pr)* RVAR('sl',i,p_pr2)); // h2
405 //g[cix] = x[gix("dl",r1,r2,p)]-x[gix("sl",r1,r2,p)]-x[gix("sa",r1,r2,p)];
407 for (uint r2To=0;r2To<l2r[r1].size();r2To++){
409 }
413 }
415
416 //mkteq4(i,p_pr).. RVAR('dl',i,p_pr) =e= sum(p_tr, a(p_pr,p_tr)*(RVAR('sl',i,p_tr))); // eq. 13
418 g[cix] = x[gix("dl",r1,r2,p)];
419 for (uint p2=0;p2<secPr.size();p2++){
422 }
424
425
426 // mkteq5(i,p_pr).. RVAR('sc',i,p_pr) =e= FF(i,p_pr)*(RVAR('pc',i,p_pr)**sigma(p_pr)); // eq. 21
427 // SUPPLY EQUATION OF PRIMARY PRODUCTS
428
429
434
435 // Added for carbon project ----------------------
436 double carbonPrice = gpd("carbonPrice",l2r[r1][r2],"",DATA_NOW); //using dummy region until Anto solves issue // Solved and generalised ;-)
438 double Pct = carbonPrice*intRate;
440 // ------------------------------------------------
441
443 // -----------------------------------------------
444
445 //g[cix] = x[gix("sc",r1,r2,p)]-ff*pow(x[gix("pc",r1,r2,p)]*pol_mktDirInt_s,sigma);
447
448
449 // mkteq8(i,p_pr).. RVAR('sa',i,p_pr)/RVAR('sl',i,p_pr) =e= ((t1(i,p_pr)*RVAR('pl',i,p_pr))/(r1(i,p_pr)*PT_t(p_pr)))**eta(i,p_pr); // h8 and h4 ?
452 r1v = 1-t1;
455 g[cix] = x[gix("sa",r1,r2,p)]/x[gix("sl",r1,r2,p)] - pow((t1*x[gix("pl",r1,r2,p)])/(r1v*pworld),eta);
457
458 // mkteq14(i,p_pr).. RVAR('pc',i,p_pr)*RVAR('sc',i,p_pr) =e= RVAR('sl',i,p_pr)*RVAR('pl',i,p_pr)+RVAR('sa',i,p_pr)*PT_t(p_pr); // h10
461 g[cix] = x[gix("pc",r1,r2,p)]*x[gix("sc",r1,r2,p)]-x[gix("sl",r1,r2,p)]*x[gix("pl",r1,r2,p)]-x[gix("sa",r1,r2,p)]*pworld;
463
464 //mkteq24(i,p_pr).. RVAR('sc',i,p_pr) =e= (t1(i,p_pr)*(RVAR('sa',i,p_pr)**((eta(i,p_pr)-1)/eta(i,p_pr)))+ r1(i,p_pr)*(RVAR('sl',i,p_pr)**((eta(i,p_pr)-1)/eta(i,p_pr))))**(eta(i,p_pr)/(eta(i,p_pr)-1)); // h4
467 r1v = 1-t1;
469 g[cix] = x[gix("sc",r1,r2,p)] -
470 pow(
471 t1 * pow(x[gix("sa",r1,r2,p)],(eta-1)/eta)
472 + r1v * pow(x[gix("sl",r1,r2,p)],(eta-1)/eta),
473 eta/(eta-1)
474 );
476
477 // mkteq17(i,p_tr).. RVAR('sl',i,p_tr) =l= Kt(i,p_tr); // h16 in the presentation paper
482
483 // mkeq26(i,prd,j).. RVAR('pl',j,prd)-RVAR('pl',i,prd)-CT(i,j,prd) =l= 0;
485 for (uint r2To=0;r2To<l2r[r1].size();r2To++){
487 ct = (gpd("ct",l2r[r1][r2],allPr[p],DATA_NOW,i2s(l2r[r1][r2To])) * gpd("pol_tcSub",l2r[r1][r2],allPr[p])) ;
489 }
491
492 // mkteq25(i,p_tr).. sum(p_pr, a(p_pr,p_tr)*RVAR('pl',i,p_pr))+m(i,p_tr) =g= (RVAR('pl',i,p_tr)); // price of raw products + transf cost > trasf product
496 for (uint p2=0;p2<priPr.size();p2++){
499 }
501
502// // mkteq18(i,p_pr).. RVAR('sa',i,p_pr)+RVAR('sl',i,p_pr) =l= dispor(i,p_pr); // total supply lower than the available stock
503// CONSTRAIN_START_LOOP(priPr,14)
504// in = gpd("in",l2r[r1][r2],priPr[p]);
505// double d1 = gix("sa",r1,r2,p);
506// double d2 = gix("sl",r1,r2,p);
507// g[cix] = x[gix("sa",r1,r2,p)]+x[gix("sl",r1,r2,p)]-in;
508// CONSTRAIN_END_LOOP
509
510 // resbounds(i, p_pr_comb).. RVAR('sa',i,p_pr)+RVAR('sl',i,p_pr) =l= dispor(i,p_pr); // total supply lower than the available stock - FOR all combination subsets of ins
512 //ModelRegion* REG = MTHREAD->MD->getRegion(l2r[r1][r2]); // possibly slower
513 //in = REG->inResByAnyCombination[p];
514 in = ins[r1][r2][p];
515 //if(p==0){
516 // in = 1.0; // workaround to lead -1<0 rather than 0<0 for the first (empty) subset - notneeded
517 //}
518 g[cix] = -in;
519 for(uint i=0;i<priPrCombs[p].size();i++){
521 }
522 g[cix] -= overharvestingAllowance; //0.02 don't work always, expecially intermediate scnearios, 0.1 seems to work but produce a large artefact 20160219: made it a parameter
523
525
526 //CONSTRAIN_START_LOOP(priPr,15)
527 // g[cix] = x[gix("st",r1,r2,p)]-(x[gix("sl",r1,r2,p)]+x[gix("sa",r1,r2,p)]);
528 //CONSTRAIN_END_LOOP
529
530 return true;
531}
532
533
534// ******** NOTHING TO DO BELOW THIS LINE ********************************
535
537 MTHREAD = MTHREAD_h;
538 nVar = 0;
539 nCons = 0;
542}
543
544Opt::~Opt(){
545
546}
547
548
549bool
550Opt::get_nlp_info(Index& n, Index& m, Index& nnz_jac_g,
551 Index& nnz_h_lag, IndexStyleEnum& index_style){
552
553
555 // does this initialisation code only once
570
571 for(uint i=0;i<l1regIds.size();i++){
572 std::vector<int> l2ChildrenIds;
575 for(uint j=0;j<l2Childrens.size();j++){
576 l2ChildrenIds.push_back(l2Childrens[j]->getRegId());
577 }
578 if(l2ChildrenIds.size()){
579 l2r.push_back(l2ChildrenIds);
580 }
581 }
582
583 // Create a vector with all possible combinations of primary products
586
587 // put the variables and their domain in the vars map
588 declareVariables();
589
590 // declaring the contrains...
591 declareConstrains();
592
593 // calculate number of variables and constrains..
595
596 // cache initial positions (variables and constrains)..
597 cacheInitialPosition();
598
599 // cache initial positions (variables and constrains)..
600 cachePositions();
601
602 //tempDebug();
603
604 //debugPrintParameters();
605
606 } // finish initialisation things to be done only the first year
607
609
612
614
615 copyInventoryResourses();
616
617 generate_tapes(n, m, nnz_jac_g, nnz_h_lag);
618
619 //if(initOpt){
620 // calculateSparsityPatternJ();
621 // calculateSparsityPatternH();
622 //tempDebug();
623 //}
624
625 // use the C style indexing (0-based)
626 index_style = C_STYLE;
627
629 return true;
630}
631
632bool
633Opt::get_bounds_info(Index n, Number* x_l, Number* x_u, Index m, Number* g_l, Number* g_u){
634
635 // Set the bounds for the endogenous variables..
636 for (Index i=0; i<n; i++) {
639 }
640
641 // Set the bounds for the constraints..
642 for (Index i=0; i<m; i++) {
644 switch (direction){
646 g_l[i] = 0.;
647 g_u[i] = 0.;
648 break;
650 g_l[i] = -2e19;
651 g_u[i] = 0.;
652 break;
654 g_l[i] = 0.;
655 g_u[i] = 2e19;
656 break;
657 }
658 }
659 return true;
660}
661
662bool
664 Index m, bool init_lambda, Number* lambda){
665
666 // function checked on 20120724 on a subset of 3 regions and 4 products. All variables initial values are correctly those outputed by gams in 2006.
667 //int thisYear = MTHREAD->SCD->getYear();
668 //int initialOptYear = MTHREAD->MD->getIntSetting("initialOptYear");
669 //if(thisYear != initialOptYear) return true;
670
671 //msgOut(MSG_DEBUG,"Giving optimising variables previous years value as starting point");
672 // Here, we assume we only have starting values for x, if you code
673 // your own NLP, you can provide starting values for the others if
674 // you wish.
675 assert(init_x == true);
676 assert(init_z == false);
677 assert(init_lambda == false);
678
679 VarMap::iterator viter;
680
681 // fixing the starting points for each variable at the level of the previous years
683 //string debugs = viter->first;
684 int vdomtype = viter->second.domain;
690 }
691 }
692 }
698 }
699 }
700 }
706 }
707 }
708 }
714 x[gix(viter->first,r1,r2,p,r2To)]= gpd(viter->first,l2r[r1][r2],allPr[p],previousYear,i2s(l2r[r1][r2To]));
715 }
716 }
717 }
718 }
719 } else {
720 msgOut(MSG_CRITICAL_ERROR,"Try to setting the initial value of a variable of unknow type ("+viter->first+")");
721 }
722 }
723
724 //msgOut(MSG_DEBUG,"Finisced initial value assignments");
725
726 return true;
727}
728
729
730void
731Opt::finalize_solution(SolverReturn status,
732 Index n, const Number* x, const Number* z_L, const Number* z_U,
733 Index m, const Number* g, const Number* lambda,
734 Number obj_value, const IpoptData* ip_data, IpoptCalculatedQuantities* ip_cq){
735
736 printf("\n\nObjective value\n");
737 printf("f(x*) = %e\n", obj_value);
738
739 // --> here is where to code the assignment of optimal values to to spd()
740
741 VarMap::iterator viter;
742
743 // fixing the starting points for each variable at the level of the previous years
745 //string debugs = viter->first;
746 int vdomtype = viter->second.domain;
752 }
753 }
754 }
760
761 }
762 }
763 }
769 }
770 }
771 }
777 //if(x[gix(viter->first,r1,r2,p,r2To)] > 0){
778 // cout << l2r[r1][r2] << "\t" << allPr[p] << "\t" << l2r[r1][r2To] << "\t" << x[gix(viter->first,r1,r2,p,r2To)] << endl;
779 //}
780 spd(x[gix(viter->first,r1,r2,p,r2To)],viter->first,l2r[r1][r2],allPr[p],DATA_NOW,false,i2s(l2r[r1][r2To]));
781 }
782 }
783 }
784 }
785 } else {
786 msgOut(MSG_CRITICAL_ERROR,"Try to setting the solved value of a variable of unknow type ("+viter->first+")");
787 }
788 }
789
790 // memory deallocation of ADOL-C variables
792
793 free(rind_g);
794 free(cind_g);
795
798
799 free(rind_L_total);
800 free(cind_L_total);
801 free(jacval);
802 free(hessval);
803
804 for (int i=0;i<n+m+1;i++) {
805 free(HP_t[i]);
806 }
807 free(HP_t);
808
809}
810
811//*************************************************************************
812//
813//
814// Nothing has to be changed below this point !!
815//
816//
817//*************************************************************************
818
819
820bool
822 eval_obj(n,x,obj_value);
823
824 return true;
825}
826
827bool
829
830 gradient(tag_f,n,x,grad_f);
831
832 return true;
833}
834
835bool
837
838 eval_constraints(n,x,m,g);
839
840 return true;
841}
842
843bool
845 Index* iRow, Index *jCol, Number* values){
846 if (values == NULL) {
847 // return the structure of the jacobian
848
850 {
851 iRow[idx] = rind_g[idx];
852 jCol[idx] = cind_g[idx];
853 }
854 }
855 else {
856 // return the values of the jacobian of the constraints
857
859
861 {
862 values[idx] = jacval[idx];
863
864 }
865 }
866 return true;
867}
868
869bool
870Opt::eval_h(Index n, const Number* x, bool new_x, Number obj_factor, Index m, const Number* lambda,
871 bool new_lambda, Index nele_hess, Index* iRow, Index* jCol, Number* values){
872
873 //return false;
874
875 if (values == NULL) {
876 // return the structure. This is a symmetric matrix, fill the lower left
877 // triangle only.
878
880 {
881 iRow[idx] = rind_L[idx];
882 jCol[idx] = cind_L[idx];
883 }
884 }
885 else {
886 // return the values. This is a symmetric matrix, fill the lower left
887 // triangle only
888
889 for(Index idx = 0; idx<n ; idx++)
890 x_lam[idx] = x[idx];
891 for(Index idx = 0; idx<m ; idx++)
892 x_lam[n+idx] = lambda[idx];
893 x_lam[n+m] = obj_factor;
894
895 sparse_hess(tag_L, n+m+1, 1, x_lam, &nnz_L_total, &rind_L_total, &cind_L_total, &hessval, options_L);
896
897 Index idx = 0;
899 {
900 if((rind_L_total[idx_total] < (unsigned int) n) && (cind_L_total[idx_total] < (unsigned int) n))
901 {
902 values[idx] = hessval[idx_total];
903 idx++;
904 }
905 }
906 }
907
908 return true;
909
910 //return false;
911}
912
913
914//*************** ADOL-C part ***********************************
915
916void
917Opt::generate_tapes(Index n, Index m, Index& nnz_jac_g, Index& nnz_h_lag){
918 /// Copied from http://bocop.org/
919 Number *xp = new double[n];
920 Number *lamp = new double[m];
921 Number *zl = new double[m];
922 Number *zu = new double[m];
923
924 adouble *xa = new adouble[n];
925 adouble *g = new adouble[m];
926 adouble *lam = new adouble[m];
927 adouble sig;
928 adouble obj_value;
929
930 double dummy;
931// double *jacval;
932
933 int i,j,k,l,ii;
934
936
937// cout << " Avant get_start" << endl;
938 get_starting_point(n, 1, xp, 0, zl, zu, m, 0, lamp);
939// cout << " Apres get_start" << endl;
940
941 //if(initOpt){ // that's funny, if I use this I get it slighly longer times, whatever I then use trace_off() or trace_off(1) (save to disk, seems unnecessary). If I use regenerated tapes I have also slighly inaccurate results.
942 trace_on(tag_f);
943
944 for(Index idx=0;idx<n;idx++)
945 xa[idx] <<= xp[idx];
946
947 eval_obj(n,xa,obj_value);
948
949 obj_value >>= dummy;
950
951 trace_off();
952
953 trace_on(tag_g);
954
955 for(Index idx=0;idx<n;idx++)
956 xa[idx] <<= xp[idx];
957
958 eval_constraints(n,xa,m,g);
959
960
961 for(Index idx=0;idx<m;idx++)
962 g[idx] >>= dummy;
963
964 trace_off();
965
966 trace_on(tag_L);
967
968 for(Index idx=0;idx<n;idx++)
969 xa[idx] <<= xp[idx];
970 for(Index idx=0;idx<m;idx++)
971 lam[idx] <<= 1.0;
972 sig <<= 1.0;
973
974 eval_obj(n,xa,obj_value);
975
976 obj_value *= sig;
977 eval_constraints(n,xa,m,g);
978
979 for(Index idx=0;idx<m;idx++)
980 obj_value += g[idx]*lam[idx];
981
982 obj_value >>= dummy;
983
984 trace_off();
985 //} // end of if initOpt()
986
987
988
989 rind_g = NULL;
990 cind_g = NULL;
991
996
997 jacval=NULL;
998
1000
1001 options_g[2] = 0;
1002 nnz_jac_g = nnz_jac;
1003
1004 unsigned int **JP_f=NULL; /* compressed block row storage */
1005 unsigned int **JP_g=NULL; /* compressed block row storage */
1006 unsigned int **HP_f=NULL; /* compressed block row storage */
1007 unsigned int **HP_g=NULL; /* compressed block row storage */
1008 unsigned int *HP_length=NULL; /* length of arrays */
1009 unsigned int *temp=NULL; /* help array */
1010
1011 int ctrl_H;
1012
1013 JP_f = (unsigned int **) malloc(sizeof(unsigned int*));
1014 JP_g = (unsigned int **) malloc(m*sizeof(unsigned int*));
1015 HP_f = (unsigned int **) malloc(n*sizeof(unsigned int*));
1016 HP_g = (unsigned int **) malloc(n*sizeof(unsigned int*));
1018 HP_length = (unsigned int *) malloc((n)*sizeof(unsigned int));
1019 ctrl_H = 0;
1020
1021 hess_pat(tag_f, n, xp, HP_f, ctrl_H);
1022
1023 indopro_forward_safe(tag_f, 1, n, xp, JP_f);
1024 indopro_forward_safe(tag_g, m, n, xp, JP_g);
1025 nonl_ind_forward_safe(tag_g, m, n, xp, HP_g);
1026
1027 for (i=0;i<n;i++)
1028 {
1029 if (HP_f[i][0]+HP_g[i][0]!=0)
1030 {
1031 if (HP_f[i][0]==0) // number of non zeros in the i-th row
1032 {
1034 for(j=0;j<=(int) HP_g[i][0];j++)
1035 {
1036 HP_t[i][j] = HP_g[i][j];
1037 }
1038 HP_length[i] = HP_g[i][0]+HPOFF;
1039 }
1040 else
1041 {
1042 if (HP_g[i][0]==0) // number of non zeros in the i-th row
1043 {
1045 for(j=0;j<=(int) HP_f[i][0];j++)
1046 {
1047 HP_t[i][j] = HP_f[i][j];
1048 }
1049 HP_length[i] = HP_f[i][0]+HPOFF;
1050 }
1051 else
1052 {
1054 k = l = j = 1;
1055 while ((k<=(int) HP_f[i][0]) && (l <= (int) HP_g[i][0]))
1056 {
1057 if (HP_f[i][k] < HP_g[i][l])
1058 {
1059 HP_t[i][j]=HP_f[i][k];
1060 j++; k++;
1061 }
1062 else
1063 {
1064 if (HP_f[i][k] == HP_g[i][l])
1065 {
1066 HP_t[i][j]=HP_f[i][k];
1067 l++;j++;k++;
1068 }
1069 else
1070 {
1071 HP_t[i][j]=HP_g[i][l];
1072 j++;l++;
1073 }
1074 }
1075 } // end while
1076
1077 // Fill the end of the vector if HP_g[i][0] < HP_f[i][0]
1078 for(ii=k;ii<=(int) HP_f[i][0];ii++)
1079 {
1080 HP_t[i][j] = HP_f[i][ii];
1081 j++;
1082 }
1083
1084 // Fill the end of the vector if HP_f[i][0] < HP_g[i][0]
1085 for(ii=l;ii<=(int) HP_g[i][0];ii++)
1086 {
1087 HP_t[i][j] = HP_g[i][ii];
1088 j++;
1089 }
1090
1091 }
1092 }
1095 }
1096 else
1097 {
1099 HP_t[i][0]=0;
1100 HP_length[i]=HPOFF;
1101 }
1102
1103// if (i==(int)n-1)
1104// {
1105// cout << " DISPLAY FINAL TIME HP : " << endl;
1106// for (ii=0;ii<=(int)HP_length[i];ii++)
1107// cout << " -------> HP[last][" << ii << "] = " << HP_t[i][ii] << endl;
1108// }
1109 }
1110
1111// cout << " Avant les boucles" << endl;
1112// cout << " m = " << m << endl;
1113
1114 for (i=0;i<m;i++)
1115 {
1116// cout << i << " --> nnz JP_g = " << JP_g[i][0]+1 << " -- ";
1118 HP_t[n+i][0]=JP_g[i][0];
1119
1120// cout << HP_t[n+i][0] << endl;
1121
1122 for(j=1;j<= (int) JP_g[i][0];j++)
1123 {
1124 HP_t[n+i][j]=JP_g[i][j];
1125// cout << " ---------> " << HP_t[n+i][j] << endl;
1126// cout << " --> HP_length[" << JP_g[i][j] << "] = " << HP_length[JP_g[i][j]] << " -- HP_t[" << JP_g[i][j] << "][0] = " << HP_t[JP_g[i][j]][0]+1 << endl;
1127 // We write the rows allocated in the previous "for" loop
1128 // If the memory allocated for the row is not big enough :
1129 if (HP_length[JP_g[i][j]] <= HP_t[JP_g[i][j]][0]+1) //! test avec "<=" (avant on avait "<" : bug, acces memoire non allouee)
1130 {
1131// cout << " ---------> WARNING " << endl;
1132// cout << " At index " << JP_g[i][j] << endl;
1133
1134
1135 // save a copy of existing vector elements :
1138 {
1140// cout << " -------> l = " << l << " -- " << temp[l] << endl;
1141 }
1142
1143// cout << " -----------> DISPLAY " << endl;
1144// for(l=0;l<=(int)HP_t[JP_g[i][j]][0];l++)
1145// {
1146// temp[l] = HP_t[JP_g[i][j]][l]; //! valgrind : invalid read & write
1147// cout << " -------> HP[machin][" << l << "] = " << HP_t[JP_g[i][j]][l] << endl; //! valgrind : invalid read
1148// }
1149
1150
1151 // Free existing row, and allocate more memory for it :
1152// cout << " Avant free --> pointeur = " <<HP_t[JP_g[i][j]]<< endl;
1153 unsigned int machin = JP_g[i][j];
1155// cout << " Apres free --> pointeur = " <<HP_t[JP_g[i][j]]<< endl;
1156
1158 HP_length[JP_g[i][j]] = 2*HP_length[JP_g[i][j]];
1159
1160 // Put back the values in this bigger vector :
1161 for(l=0;l<=(int)temp[0];l++)
1162 HP_t[JP_g[i][j]][l] =temp[l];
1163 free(temp);
1164
1165// HP_t[JP_g[i][j]] = (unsigned int*) realloc (HP_t[JP_g[i][j]], 2*HP_length[JP_g[i][j]] * sizeof(unsigned int));
1166// HP_length[JP_g[i][j]] = 2*HP_length[JP_g[i][j]];
1167 }
1169 HP_t[JP_g[i][j]][HP_t[JP_g[i][j]][0]] = i+n; // Now adding the element at the end //! valgrind : invalid write
1170 }
1171 }
1172// cout << " Apres les boucles" << endl;
1173
1174 for(j=1;j<= (int) JP_f[0][0];j++)
1175 {
1176 if (HP_length[JP_f[0][j]] <= HP_t[JP_f[0][j]][0]+1) //! test avec "<=" (pour etre coherent avec la remarque ci dessus, mais pas de cas test, a verifier)
1177 {
1180 temp[l] = HP_t[JP_f[0][j]][l];
1181 free(HP_t[JP_f[0][j]]);
1183 HP_length[JP_f[0][j]] = 2*HP_length[JP_f[0][j]];
1184 for(l=0;l<=(int)temp[0];l++)
1185 HP_t[JP_f[0][j]][l] =temp[l];
1186 free(temp);
1187 }
1190 }
1191
1193 HP_t[n+m][0]=JP_f[0][0]+1;
1194 for(j=1;j<= (int) JP_f[0][0];j++)
1195 HP_t[n+m][j]=JP_f[0][j];
1196 HP_t[n+m][JP_f[0][0]+1]=n+m;
1197
1199
1200 nnz_h_lag = 0;
1201 for (i=0;i<n;i++)
1202 {
1205 nnz_h_lag++;
1206 free(HP_f[i]);
1207 free(HP_g[i]);
1208 }
1209 nnz_L = nnz_h_lag;
1210
1211 options_L[0] = 0;
1212 options_L[1] = 1;
1213
1214 rind_L_total = NULL;
1215 cind_L_total = NULL;
1216 hessval = NULL;
1217
1218 sparse_hess(tag_L, n+m+1, -1, xp, &nnz_L_total, &rind_L_total, &cind_L_total, &hessval, options_L);
1219
1224
1225 unsigned int ind = 0;
1226
1227 for (int i=0;i<n;i++)
1229 {
1231 {
1232 rind_L[ind] = i;
1234 }
1235 }
1236
1237 ind = 0;
1238 for (int i=0;i<n+m+1;i++)
1240 {
1242 {
1243 rind_L_total[ind] = i;
1245 }
1246 }
1247
1248 for (i=0;i<m;i++) {
1249 free(JP_g[i]);
1250 }
1251
1252 free(JP_f[0]);
1253 free(JP_f);
1254 free(JP_g);
1255 free(HP_f);
1256 free(HP_g);
1257 free(HP_length);
1258
1259 delete[] lam;
1260 delete[] g;
1261 delete[] xa;
1262 delete[] zu;
1263 delete[] zl;
1264 delete[] lamp;
1265 delete[] xp;
1266
1267}
1268
1269
1270// *************** FFSM OPT specific part ***********************************
1271
1272const int
1274 map<string, int>::const_iterator p;
1275 p=initPos.find(varName);
1277 return p->second;
1278 }
1279 else {
1280 msgOut(MSG_CRITICAL_ERROR, "Asking the initial position in the concatenated array of a variable ("+varName+") that doesn't exist!");
1281 return 0;
1282 }
1283}
1284
1285const int
1288}
1289
1290const int
1292 VarMap::const_iterator p;
1293 p=vars.find(varName);
1295 return p->second.domain;
1296 }
1297 else {
1298 msgOut(MSG_CRITICAL_ERROR, "Asking the domain type of a variable ("+varName+") that doesn't exist!");
1299 return 0;
1300 }
1301}
1302
1303const int
1306}
1307
1308template<class T> const int
1310
1311 // attenction, for computational reason we are not checking the call is within vectors limits!!!
1312
1314 int othCountriesRegions = 0;
1315 int othCountriesRegions_r2case = 0;
1316 for (uint i=0;i<r1Ix;i++){
1317 othCountriesRegions += l2r[i].size();
1318 }
1319 for (uint i=0;i<r1Ix;i++){
1321 }
1322
1323 switch (dType){
1331 return gip(v_or_c)+(othCountriesRegions_r2case)*nAllPr+(r2Ix*nPriPr+prIx)*l2r[r1Ix].size()+r2IxTo;
1333 return gip(v_or_c)+(othCountriesRegions_r2case)*nAllPr+(r2Ix*nSecPr+prIx)*l2r[r1Ix].size()+r2IxTo;
1335 return gip(v_or_c)+(othCountriesRegions_r2case)*nAllPr+(r2Ix*nAllPr+prIx)*l2r[r1Ix].size()+r2IxTo; // new 20120814, looping r1,r2,p,r2to
1336 // initial position + (other countries region pairs + same country other regions from pair + regions to)* number of all products+product
1337 //return gip(v_or_c)+(othCountriesRegions_r2case+r2Ix*l2r[r1Ix].size()+r2IxTo)*nAllPr+prIx; // looping r1,r2,r2to,p
1342 default:
1343 msgOut(MSG_CRITICAL_ERROR,"Try to calculate the position of a variable (or constrain) of unknow type.");
1344 return 0;
1345 }
1346}
1347
1348
1349const int
1350Opt::gix(const string &varName, const int& r1Ix, const int& r2Ix, const int& prIx, const int& r2IxTo) const{
1351 // attenction, for computational reasons we are not checking the call is within vectors limits!!!
1352 map <string, vector < vector < vector < vector <int> > > > >::const_iterator p;
1353 p=vpositions.find(varName);
1355 return p->second[r1Ix][r2Ix][prIx][r2IxTo];
1356 }
1357 else {
1358 msgOut(MSG_CRITICAL_ERROR, "Asking the position of a variable ("+varName+") that doesn't exist!");
1359 return 0;
1360 }
1361}
1362
1363const int
1364Opt::gix(const int &cn, const int& r1Ix, const int& r2Ix, const int& prIx, const int& r2IxTo) const{
1366}
1367
1368void
1369Opt::cacheInitialPosition(){
1370 int vInitialPosition = 0;
1371 int cInitialPosition = 0;
1372 VarMap::iterator viter;
1374 initPos.insert(pair<string, int>(viter->first, vInitialPosition));
1375 initPos_rev.insert(pair<int, string>(vInitialPosition,viter->first));
1376 vInitialPosition += getDomainElements(viter->second.domain);
1377 }
1379 cInitPos.push_back(cInitialPosition);
1381 }
1382}
1383
1384void
1385Opt::cachePositions(){
1386
1387 // variables..
1388 VarMap::iterator viter;
1390 vpositions.insert(pair<string, vector < vector < vector < vector <int> > > > >(viter->first, buildPositionVector(viter->first, viter->second.domain)));
1391 }
1392 // constrains..
1395 }
1396
1397}
1398
1399template<class T> vector < vector < vector < vector <int> > > >
1401 int pVectorSize;
1402
1403 switch (dType){
1405 pVectorSize= priPr.size();
1406 break;
1408 pVectorSize= secPr.size();
1409 break;
1411 pVectorSize= allPr.size();
1412 break;
1414 pVectorSize= priPr.size();
1415 break;
1417 pVectorSize= secPr.size();
1418 break;
1420 pVectorSize= allPr.size();
1421 break;
1424 break;
1426 pVectorSize= priPrCombs.size();
1427 break;
1428 default:
1429 msgOut(MSG_CRITICAL_ERROR,"Try to build the position of a variable (or contrain) of unknow type.");
1430 }
1431
1432
1433 vector < vector < vector < vector <int> > > > positionsToAdd;
1435 vector < vector < vector <int> > > dim1;
1437 vector < vector <int> > dim2;
1438 for(uint p=0;p<pVectorSize;p++){
1439 vector <int> dim3;
1441 dim3.push_back(gix_uncached(v_or_c,r1,r2,p,r2To));
1442 }
1443 dim2.push_back(dim3);
1444 }
1445 dim1.push_back(dim2);
1446 }
1447 positionsToAdd.push_back(dim1);
1448 }
1449 return positionsToAdd;
1450}
1451
1452
1453void
1455 // calculating the number of variables and the initial positions in the concatenated array..
1456 nVar = 0;
1457 VarMap::iterator viter;
1460 }
1461
1462 // calculating the number of constrains..
1463 nCons = 0;
1464 nEqualityConstrains = 0;
1465 nLowerEqualZeroConstrains = 0;
1466 nGreaterEqualZeroConstrains = 0;
1471 continue;
1474 continue;
1477 continue;
1478 } else {
1479 msgOut(MSG_CRITICAL_ERROR, "Asking for a constrain with unknown direction ("+i2s(cons[i].direction)+")");
1480 }
1481 }
1482
1483 msgOut(MSG_INFO,"The model will work with "+i2s(nVar)+" variables and "+i2s(nCons)+" constrains ("+i2s(nEqualityConstrains)+" equalities, "+i2s(nLowerEqualZeroConstrains)+" lower than 0 and "+i2s(nGreaterEqualZeroConstrains)+" greater than 0)");
1484}
1485
1486int
1488 int elements = 0;
1489 switch (domain){
1499 }
1500 return elements;
1504 }
1505 return elements;
1509 }
1510 return elements;
1512 return 1;
1515 default:
1517 }
1518}
1519
1520int
1526 }
1527 } else {
1530 }
1531 }
1532 }
1534}
1535
1536double
1538
1539 map <int, string>::const_iterator p;
1540 p=initPos_rev.upper_bound(idx);
1541 p--;
1542 VarMap::const_iterator p2;
1543 p2=vars.find(p->second);
1546 if (p2->second.l_bound_var == ""){ // this var don't specific a variable as bound
1547 return p2->second.l_bound;
1548 } else {
1550 }
1552 if (p2->second.u_bound_var == ""){ // this var don't specific a variable as bound
1553 return p2->second.u_bound;
1554 } else {
1556 }
1557 } else {
1558 msgOut(MSG_CRITICAL_ERROR, "Asking the bound with a type ("+i2s(bound_type)+") that I don't know how to handle !");
1559 }
1560 }
1561 else {
1562 msgOut(MSG_CRITICAL_ERROR, "Asking the bound from a variable ("+p->second+") that doesn't exist!");
1563 }
1564 return 0.;
1565}
1566
1567double
1569 // Tested 2015.01.08 with DOM_ALL_PR, DOM_PRI_PR, DOM_ALL_PR, DOM_R2_ALL_PR.
1570 int r1,r2,p,r2to;
1572 //cout << "getBoundByVarAndIndex():\t" << var.name << '\t' << idx << '\t' << gip(var.name) << '\t' << r1 << '\t' << r2 << '\t' << p << '\t' << r2to << endl;
1573 //cout << " --variables:\t" << var.l_bound_var << '\t' << var.u_bound_var << '\t' << "" << '\t' << l2r[r1][r2] << '\t' << "" << '\t' << allPr[p] << '\t' << l2r[r1][r2to] << endl;
1575 if(r2to){
1577 } else {
1579 }
1580 } else {
1581 if(r2to){
1583 } else {
1584 //cout << gpd(var.u_bound_var,l2r[r1][r2],allPr[p]) << endl;
1586 }
1587 }
1588}
1589
1590constrain*
1596 }
1597 } else {
1600 }
1601 }
1602 }
1604}
1605
1606
1607void
1608Opt::unpack(int ix_h, int domain, int initial, int &r1_h, int &r2_h, int&p_h, int&r2to_h, bool fullp){
1609 ix_h = ix_h-initial;
1610 double ix=0;
1611 bool r2flag = false;
1612 int pIndexToAdd = 0;
1613 int np=0;
1615 np = nPriPr;
1617 np = nSecPr;
1619 np = nAllPr;
1621 r1_h=0;r2_h=0;p_h=0;r2to_h=0;
1622 return;
1623 } else {
1625 }
1627 r2flag = true;
1628 }
1629 if(fullp && (domain==DOM_SEC_PR || domain==DOM_R2_SEC_PR)){ // changed 20140107 (any how, previously the unpack() function was not used!!)
1630 pIndexToAdd = nPriPr;
1631 //cout << "pindexToAdd: " << pIndexToAdd << endl;
1632 }
1633
1636 for (uint p=0;p<np;p++){
1637 if(!r2flag){
1638 if(ix==ix_h){
1639 r1_h=r1;
1640 r2_h=r2;
1641 p_h=p+pIndexToAdd;
1642 r2to_h=0;
1643 return;
1644 }
1645 ix++;
1646 } else {
1648 if(ix==ix_h){
1649 r1_h=r1;
1650 r2_h=r2;
1651 p_h=p+pIndexToAdd;
1652 r2to_h=r2To;
1653 return;
1654 }
1655 ix++;
1656 }
1657 }
1658 }
1659 }
1660 }
1661 msgOut(MSG_CRITICAL_ERROR, "Error in unpack() function. Ix ("+i2s(ix_h)+") can not be unpacked");
1662}
1663
1664int
1671 return i;
1672 }
1673 }
1675}
1676
1677
1678void
1680
1681 unsigned int **jacpat=NULL; // compressed row storage
1682 int options_j[3]; // options for the jacobian patterns
1683 double *x;
1684 int retv_j = -1; // return value
1685
1686 options_j[0] = 0; // index domain propagation
1687 options_j[1] = 0; // automatic mode choice (ignored here)
1688 options_j[2] = 0; // safe
1691
1692 nzjelements.clear();
1693
1695
1697 for (int j=1;j<=jacpat[i][0];j++){
1698 vector <int> nzjelement;
1699 nzjelement.push_back(i);
1700 nzjelement.push_back(jacpat[i][j]);
1701 nzjelements.push_back(nzjelement);
1702 }
1703 }
1704}
1705
1706void
1708
1709 unsigned int **hesspat=NULL; // compressed row storage
1710 int options_h=0; // options for the hessian patterns
1711 double *x;
1712 int retv_h = -1; // return value
1713
1716
1718
1720 for (int j=1;j<=hesspat[i][0];j++){
1721 if(hesspat[i][j]<=i){
1722 vector <int> nzhelement;
1723 nzhelement.push_back(i);
1724 nzhelement.push_back(hesspat[i][j]);
1725 nzhelements.push_back(nzhelement);
1726 }
1727 }
1728 }
1729}
1730
1731void
1732Opt::tempDebug(){
1733
1735 cout << "IDX;ROW;COL" << endl;
1738 }
1739
1742 //exit(0);
1743
1744}
1745
1746
1747const Number&
1749 return (a<b)?b:a;
1750}
1751const adouble&
1753 return (a<b)?b:a;
1754}
1755
1756
1757bool
1758Opt::intermediate_callback(AlgorithmMode mode, Index iter, Number obj_value, Number inf_pr, Number inf_du, Number mu, Number d_norm, Number regularization_size, Number alpha_du, Number alpha_pr, Index ls_trials, const IpoptData *ip_data, IpoptCalculatedQuantities *ip_cq){
1759 int itnumber = iter;
1760 if(itnumber%10==0){
1762 }
1763 return true;
1764}
1765
1766int
1769}
1770
1771/*
1772template <class T> const T&
1773Opt::mymax ( const T& a, const T& b ){
1774 return (a<b)?b:a;
1775}
1776*/
1777/**
1778 * @brief Opt::declareVariable
1779 * Define a single variable together with its domain and optionally its lower and upper bound (default 0.0, +inf)
1780 *
1781 * @param name var name
1782 * @param domain domain of the variable
1783 * @param l_bound lower bound (fixed)
1784 * @param u_bound upper bound (fixed)
1785 * @param l_bound_var variable name defining lower bound
1786 * @param u_bound_var variable name defining upper bound
1787 */
1788
1789void
1790Opt::declareVariable(const string &name, const int & domain, const string &desc, const double & l_bound, const double & u_bound, const string & l_bound_var, const string & u_bound_var){
1791 endvar end_var;
1792 end_var.name = name;
1793 end_var.domain = domain;
1794 end_var.l_bound = l_bound;
1795 end_var.u_bound = u_bound;
1796 end_var.l_bound_var = l_bound_var;
1797 end_var.u_bound_var = u_bound_var;
1798 end_var.desc= desc;
1799 vars.insert(std::pair<std::string, endvar >(name, end_var));
1800}
1801/**
1802 * @brief Opt::createCombinationsVector
1803 * Return a vector containing any possible combination of nItems items (including all subsets).
1804 *
1805 * For example with nItems = 3:
1806 * 0: []; 1: [0]; 2: [1]; 3: [0,1]; 4: [2]; 5: [0,2]; 6: [1,2]; 7: [0,1,2]
1807
1808 * @param nItems number of items to create p
1809 * @return A vector with in each slot the items present in that specific combination subset.
1810 */
1811/*
1812vector < vector <int> >
1813Opt::createCombinationsVector(const int& nItems) {
1814 // Not confuse combination with permutation where order matter. Here it doesn't matter, as much as the algorithm is the same and returns
1815 // to as each position always the same subset
1816 vector < vector <int> > toReturn;
1817 int nCombs = pow(2,nItems);
1818 //int nCombs = nItems;
1819 for (uint i=0; i<nCombs; i++){
1820 vector<int> thisCombItems; //concernedPriProducts;
1821 for(uint j=0;j<nItems;j++){
1822 uint j2 = pow(2,j);
1823 if(i & j2){ // bit a bit operator, p217 C++ book
1824 thisCombItems.push_back(j);
1825 }
1826 }
1827 toReturn.push_back(thisCombItems);
1828 }
1829
1830// cout << "N items:\t" << nItems << endl;
1831// for (uint i=0;i<nCombs; i++){
1832// cout << " "<< i << ":\t";
1833// for (uint j=0;j<toReturn[i].size();j++){
1834// cout << toReturn[i][j] << " ";
1835// }
1836// cout << endl;
1837// }
1838// exit(0);
1839 return toReturn;
1840}
1841*/
1842
1843void
1844Opt::copyInventoryResourses(){
1845 // This function is not really needed, as actually the solver works also picking the region and the in dynamically
1846 // Caching the inventories in a vector should however be faster.
1847 // We now need it, as the vector inResByAnyCombination() account for the union between the inv set of the various pp. Also it now include the total mortality (alive plus death, if modelled)
1848 vector < vector < vector <double> > > in_temp;
1850 vector < vector <double> > dim1;
1852 vector <double> dim2;
1856 dim2.push_back(this_in);
1857 }
1858 dim1.push_back(dim2);
1859 }
1860 in_temp.push_back(dim1);
1861 }
1862 ins = in_temp;
1863}
@ DOM_PRI_PR
Primary products // domain of variables and constrains: primary, secondary, all products or all produ...
Definition BaseClass.h:93
@ DOM_R2_SEC_PR
Secondary products over r2 couple regions (in-country commercial flows)
Definition BaseClass.h:97
@ DOM_R2_PRI_PR
Primary products over r2 couple regions (in-country commercial flows)
Definition BaseClass.h:96
@ DOM_R2_ALL_PR
All products over r2 couple regions (in-country commercial flows)
Definition BaseClass.h:98
@ DOM_PRI_PR_ALLCOMBS
All possible combinations of primary products (2^ number of primary products)
Definition BaseClass.h:100
void msgOut(const int &msgCode_h, const string &msg_h, const bool &refreshGUI_h=true) const
Overloaded function to print the output log.
Definition BaseClass.cpp:50
double getDoubleSetting(const string &name_h, int position=0, int reg=WORLD) const
Definition ModelData.cpp:1109
vector< vector< int > > createCombinationsVector(const int &nItems)
Return a vector containing any possible combination of nItems items (including any possible subset)....
Definition ModelData.cpp:2055
vector< string > getStringVectorSetting(const string &name_h, int reg=WORLD) const
Definition ModelData.cpp:1129
vector< int > getRegionIds(int level_h, bool excludeResidual=true)
Definition ModelData.cpp:366
int getIntSetting(const string &name_h, int position=0, int reg=WORLD) const
Definition ModelData.cpp:1105
Definition ModelRegion.h:45
vector< ModelRegion * > getChildren(bool excludeResidual=true)
Returns a pointer to the parent regions.
Definition ModelRegion.cpp:55
vector< double > inResByAnyCombination
Vector of inventory resource for each possible combination of primary products. This store both alive...
Definition ModelRegion.h:88
const double gpd(const string &type_h, const int ®Id_h, const string &prodId_h, const int &year=DATA_NOW, const string &freeDim_h="") const
Definition Opt.h:168
map< string, vector< vector< vector< vector< int > > > > > vpositions
cached position in the concatenated vector for each variables. Dimensions are l1reg,...
Definition Opt.h:204
const int gix(const string &varName, const int &r1Ix, const int &r2Ix, const int &prIx, const int &r2IxTo=0) const
Get the index in the concatenated array gived a certain var name, the reg lev1 index,...
Definition Opt.cpp:1351
vector< vector< int > > priPrCombs
A vector with all the possible combinations of primary products.
Definition Opt.h:198
vector< vector< vector< double > > > ins
A copy of the inventoried resourses by region and primary product combination. It works also with dyn...
Definition Opt.h:199
virtual bool intermediate_callback(AlgorithmMode mode, Index iter, Number obj_value, Number inf_pr, Number inf_du, Number mu, Number d_norm, Number regularization_size, Number alpha_du, Number alpha_pr, Index ls_trials, const IpoptData *ip_data, IpoptCalculatedQuantities *ip_cq)
Definition Opt.cpp:1759
virtual bool get_bounds_info(Index n, Number *x_l, Number *x_u, Index m, Number *g_l, Number *g_u)
Definition Opt.cpp:634
map< int, string > initPos_rev
A map with the name of the variable keyed by its initial position in the index.
Definition Opt.h:201
void cacheInitialPosition()
cache the initial positions of the variables and the constrains
Definition Opt.cpp:1370
double getBoundByIndex(const int &bound_type, const int &idx)
Return the bound of a given variable (by index)
Definition Opt.cpp:1538
int getConstrainDirectionByIndex(int idx)
Return the direction of a given constrain.
Definition Opt.cpp:1522
const int gip(const string &varName) const
Get the initial index position of a given variable in the concatenated array.
Definition Opt.cpp:1274
virtual bool eval_f(Index n, const Number *x, bool new_x, Number &obj_value)
Definition Opt.cpp:822
double overharvestingAllowance
Allows to harvest more than the resources available. Useful when resources got completelly exausted a...
Definition Opt.h:222
map< string, int > initPos
A map that returns the initial index position in the concatenated array for each variable.
Definition Opt.h:200
virtual bool get_starting_point(Index n, bool init_x, Number *x, bool init_z, Number *z_L, Number *z_U, Index m, bool init_lambda, Number *lambda)
Definition Opt.cpp:664
void cachePositions()
cache the exact position index (initial+f(r1,r2,p,r2To) for each variable and constrain
Definition Opt.cpp:1386
virtual bool get_nlp_info(Index &n, Index &m, Index &nnz_jac_g, Index &nnz_h_lag, IndexStyleEnum &index_style)
Definition Opt.cpp:551
virtual bool eval_jac_g(Index n, const Number *x, bool new_x, Index m, Index nele_jac, Index *iRow, Index *jCol, Number *values)
Definition Opt.cpp:845
void declareVariable(const string &name, const int &domain, const string &desc="", const double &l_bound=0.0, const double &u_bound=UBOUND_MAX, const string &l_bound_var="", const string &u_bound_var="")
Declare a single variable, its domain and its bounds.
Definition Opt.cpp:1791
vector< vector< vector< vector< int > > > > buildPositionVector(const T &v_or_c, int dType)
build the matrix of the positions for a given variable or contrain
Definition Opt.cpp:1401
virtual bool eval_g(Index n, const Number *x, bool new_x, Index m, Number *g)
Definition Opt.cpp:837
void calculateNumberVariablesConstrains()
calculate the number of variables and constrains
Definition Opt.cpp:1455
void copyInventoryResourses()
Copy the inventoried resources in the in vector for better performances.
Definition Opt.cpp:1845
map< string, endvar > vars
List of variables in the model and their domain: pr product, sec prod, all products or all products o...
Definition Opt.h:203
bool eval_constraints(Index n, const T *x, Index m, T *g)
Definition Opt.cpp:311
int getVarInstances(const string &varName)
build the matrix of the positions for a given variable or contrain
Definition Opt.cpp:1768
void unpack(int ix_h, int domain, int initial, int &r1_h, int &r2_h, int &p_h, int &r2to_h, bool fullp=false)
Return the dimensions given a certain index, domain type and initial position.
Definition Opt.cpp:1609
virtual void finalize_solution(SolverReturn status, Index n, const Number *x, const Number *z_L, const Number *z_U, Index m, const Number *g, const Number *lambda, Number obj_value, const IpoptData *ip_data, IpoptCalculatedQuantities *ip_cq)
Definition Opt.cpp:732
virtual bool eval_h(Index n, const Number *x, bool new_x, Number obj_factor, Index m, const Number *lambda, bool new_lambda, Index nele_hess, Index *iRow, Index *jCol, Number *values)
Definition Opt.cpp:871
void spd(const double &value_h, const string &type_h, const int ®Id_h, const string &prodId_h, const int &year=DATA_NOW, const bool &allowCreate=false, const string &freeDim_h="") const
Definition Opt.h:170
virtual void generate_tapes(Index n, Index m, Index &nnz_jac_g, Index &nnz_h_lag)
Definition Opt.cpp:918
vector< int > cInitPos
A vector that returns the initial index position in the concatenated array for each constrain.
Definition Opt.h:202
void declareConstrains()
declare the constrains, their domain, their direction and their associated evaluation function
Definition Opt.cpp:84
double getDetailedBoundByVarAndIndex(const endvar &var, const int &idx, const int &bType)
Return the bound of a given variable given the variable and the required index. Called by getBoundByI...
Definition Opt.cpp:1569
const int gix_uncached(const T &v_or_c, int r1Ix, int r2Ix, int prIx, int r2IxTo=0)
Get the index in the concatenated array gived a certain var name (string) or constrain index (int),...
Definition Opt.cpp:1310
vector< vector< vector< vector< vector< int > > > > > cpositions
cached position in the concatenated vector for each variables. Dimensions are contrain number,...
Definition Opt.h:205
virtual bool eval_grad_f(Index n, const Number *x, bool new_x, Number *grad_f)
Definition Opt.cpp:829
vector< vector< Index > > nzjelements
nzero elements for the jacobian matrix. nzelements[i][0] -> row (constrain), nzelements[i][1] -> colu...
Definition Opt.h:226
Thread manager. Responsable to manage the main thread and "speak" with the GUI.
Definition ThreadManager.h:66
string l_bound_var
A variable giving the lower bound. If present, the value defined in the variable overrides l_bound.
Definition Opt.h:285
string u_bound_var
A variable giving the upper bound. If present, the value defined in the variable overrides u_bound.
Definition Opt.h:286
◆ CONSTRAIN_START_LOOP
| #define CONSTRAIN_START_LOOP | ( | pVector, | |
| cn | |||
| ) |
Value:
for (uint r1=0;r1<l2r.size();r1++){ \
for (uint r2=0;r2<l2r[r1].size();r2++){ \
for (uint p=0;p<(pVector).size();p++){ \
int psec = p+nPriPr; \
cix = gix((cn), r1, r2, p);
Definition at line 40 of file Opt.cpp.
41 { \
42 for (uint r2=0;r2<l2r[r1].size();r2++){ \
43 for (uint p=0;p<(pVector).size();p++){ \
44 int psec = p+nPriPr; \
45 cix = gix((cn), r1, r2, p);